مستشعرات العين | الوحدة الرابعة| الدرس الثاني
مستشعرات العين هو عنوان الدرس الثاني من الوحدة الثالثة التي تحمل اسم “مستشعرات الروبوت” في الفصل الدراسي الثالث من مقرر “ثالث متوسط”.
ستتعرف في هذا الموضوع على وظيفة مستشعرات العين في بيئة “فيكس كود في آر”، وبشكل أكثر تحديدًا استخدام لبنات الاستشعار لبرمجة روبوت الواقع الافتراضي لاكتشاف الكائنات والألوان في البيئة المحيطة به.

لذا قم بقراءة نواتج التعلُّم جيدًا، ثم أعد قراءتها وتأكَّد من تحصيل كافة محتوياتها بعد انتهائك من دراسة الموضوع.
نواتج التعلُّم
- معرفة ماهية المركبة الذاتية القيادة.
- استشعار كائن عبر مستشعر العين الأمامية.
- استشعار كائن عبر مستشعر العين السفلية.
- استشعار لون عبر مستشعر العين الأمامية.
- استخدام مستشعرات العين لتوجيه روبوت الواقع الافتراضي حسب عوائق البيئة المحيطة.
هيا لنبدأ!
مقدمة – مستشعرات العين
تستخدِم الروبوتات المستشعرات للتفاعل مع بيئتها المحيطة. لقد تعرَّفت في الموضوع السابق على مستشعرات المسافة، وستتعرَّف في هذا الموضوع على مستشعرات العين، حيث يمكِن أن تساعد بيانات الإدخال الخاصة بهذه المستشعرات الروبوت على التحرُّك بشكل ذاتي.

القيادة الذاتية
تشهد المركبات (السيارات، والقطارات، والقوارب، وما إلى ذلك) تغييرات كبيرة في الوقت الحاضر، وتحديدًا من حيث طريقة تشغيلها، أي تحوّلها من مركبات يقودها الإنسان إلى مركبات تعمل عن طريق القيادة الذاتية (Autonomous Driving).
المركبة ذاتية القيادة هي مركبة آلية قادرة على استشعار بيئتها والعمل دون تدخُّل بشري، بحيث لا يُطلب من الإنسان أن يتحكَّم فيها في أي وقت، وليس من الضروري أن يكون موجودًا فيها على الإطلاق.
مستشعرات تقنية القيادة الذاتية (Self-Driving Technology Sensors)
تعتمد تقنية القيادة الذاتية على المستشعرات.
تحمل المركبات ذاتية القيادة أجهزة استشعار للتنقُّل في بيئتها ولمساعدتها على اكتشاف مكان وجودها وما حولها وجمع معلومات كافية عن البيئة المحيطة.

معلومة
يعدُّ نظامي ليدار (LIDAR) ونظام الرادار (Radar) التقنيتين الأكثر شيوعًا لتحديد المواقع والمسح الضوئي استنادًا إلى الموجات الكهرومغناطيسية.
مستشعرات العين
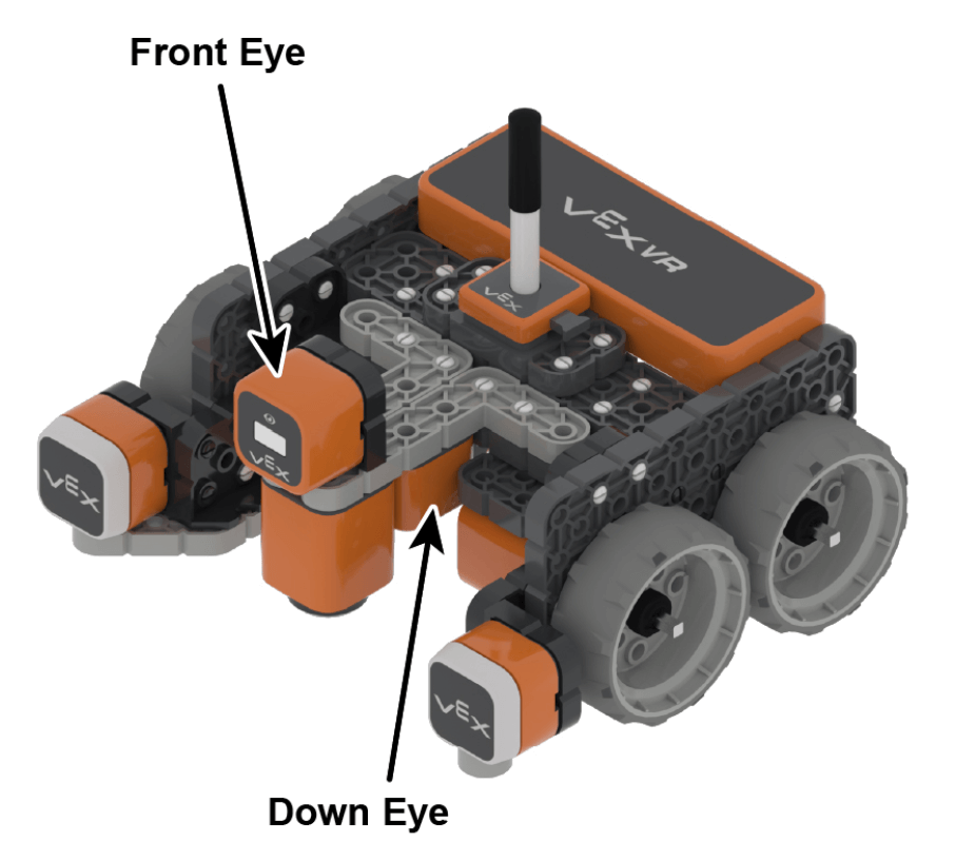
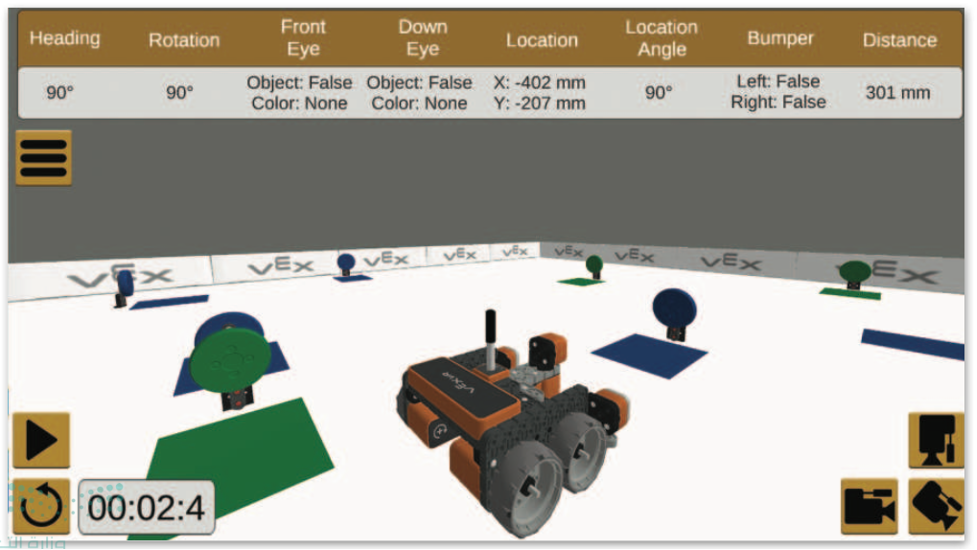
يحتوي روبوت الواقع الافتراضي على جهازي استشعار، أحدهما موجَّه للأمام، وهو مستشعر العين (Eye Sensor) الأمامية والآخر موجَّه للأسفل، وهو مستشعر العين (Eyes Sensor) السفلية.
ويمكِن لكلا المستشعرين اكتشاف وجود كائن، بحيث يكتشف مستشعر العين الأمامية الكائنات على مسافة قريبة منه، بينما يكتشف مستشعر العين السفلية الكائنات التي تحته. يمكِن لكل من مستشعرات العين (Eye Sensors) اكتشاف الألوان مثل اللون الأحمر والأخضر والأزرق ولكن يمكِنها أيضًا اكتشاف غياب هذه الألوان، والتي تظهر في بيئة “فيكس كود في آر” على أنها “لا شيء”.

لمعرفة المزيد من المعلومات عن مستشعرات العين، قم بالاطّلاع على الرابط التالي:
لبنات مستشعر العين (Eye Sensing)
يمكِنك العثور على اللبنات البرمجية الثلاث لمستشعر العين في فئة الاستشعار، وهي:
- لبنة ( ) يمثل مجسم قريب؟ (( ) is near object?).
- لبنة ( ) يستشعر ( )؟ (( ) detects ( )?).
- لبنة ( ) نسبة السطوع بالـ % (brightness in ( )%).
ستَستخدِم في هذا الموضوع أول لبنتين من لبنات مستشعر العين.

أولًا: لبنة ( ) يمثل مجسم قريب؟
لبنة ( ) يمثل مجسم قريب؟ هي لبنة مُراسِل منطقية أخرى، وتَستخدِم مستشعر العين الأمامية أو العين السفلية، حيث تُرسِل صوابًا عندما يكتشف مستشعر العين الأمامية شيئًا وخطأً عندما لا يكتشف شيئًا.

مثال 1: استشعار كائن عبر مستشعر العين الأمامية (FrontEye)
في هذا المثال، ستستخدِم ملعب القرص المتاهة (Disk Maze). برمج روبوت الواقع الافتراضي للتحرُّك إلى الأمام بالسرعة الافتراضية والتوقُّف عندما يستشعر كائنًا قريبًا.



مثال 2: استشعار كائن عبر مستشعر العين السفلية (DownEye)
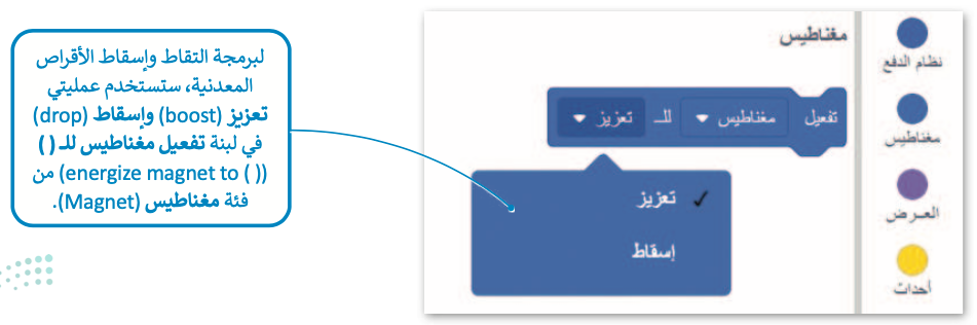
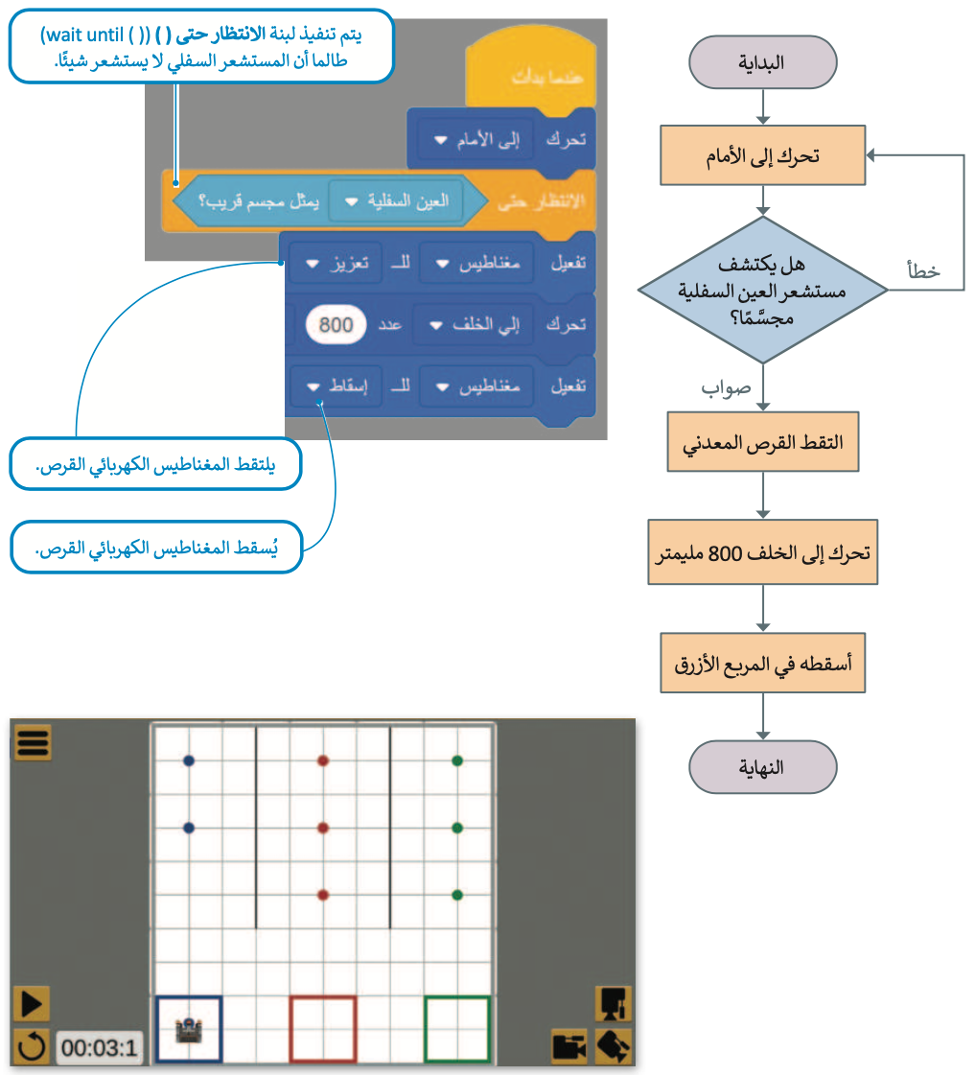
في هذا المثال، ستبرمج روبوت الواقع الافتراضي ليتحرَّك إلى الأمام بالسرعة الافتراضية في ملعب القرص المتاهة، ليكتشف باستخدام مستشعر العين السفلية الكائنات الموجودة في هذا الملعب وهي الأقراص المعدنية، وسيكون الروبوت مجهزًا بمغناطيس كهربائي (Electromagnet) يستخدمه لالتقاط القرص المعدني، وبعد التقاط القرص يتحرك الروبوت إلى الخلف لإسقاطه داخل المربع الأزرق الذي كان نقطة البداية.

لتنفيذ هذا المثال ستستخدِم لبنة تفعيل مغناطيس للـ ( ) (energize magnet to( )) لالتقاط وإسقاط الأقراص المعدنية في الملعب.
معلومة
المغناطيس الكهربائي هو نوع من المغناطيس ينتج فيه الحقل المغناطيسي بواسطة تيار كهربائي، وتتكوَّن المغناطيسات الكهربائية عادة من سلك ملفوف.
بإمكانك مراجعة محتوى موضوع “مستشعرات العين” من بدايته وحتى هذه النقطة، من خلال الرابط التالي:
ثانيًا: لبنة ( ) يستشعر ( ) (( ) detects ( ))؟
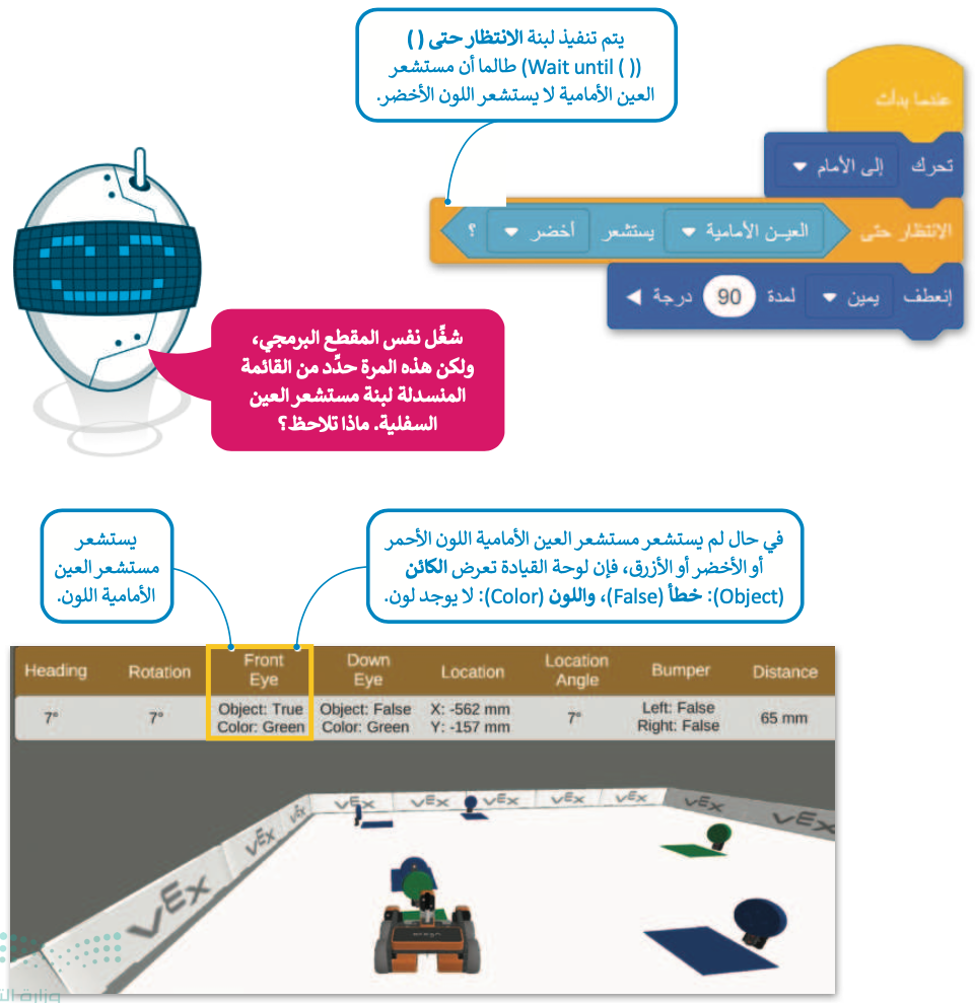
لبنة يستشعر ( ) هي لبنة في فئة الاستشعار ضمن مجموعة مستشعر العين (Eye Sensing)، وهي أيضًا لبنة مُراسِل منطقية تُرجع صوابًا عندما يستشعر المستشعر الأمامي أو المستشعر السفلي أحد الألوان الثلاثة: الأحمر، الأخضر أو الأزرق، وخطأً في حال لم يستشعر المستشعر الألوان المذكورة. يمكِنك تحديد المستشعر الذي تريده (مستشعر العين الأمامية أو مستشعر العين السفلية) من القائمة المنسدلة للبنة.
مثال 3: استشعار لون عبر مستشعر العين الأمامية (FrontEye)
في هذا المثال، ستبرمج روبوت الواقع الافتراضي ليتحرَّك إلى الأمام بالسرعة الافتراضية في ملعب القرص المتاهة. سيستخدِم الروبوت مستشعر العين الأمامية، وعندما يستشعر لون القرص المعدني الأخضر سينعطف 90 درجة إلى اليمين.
مثال 4: توجيه روبوت الواقع الافتراضي حسب عوائق البيئة المحيطة
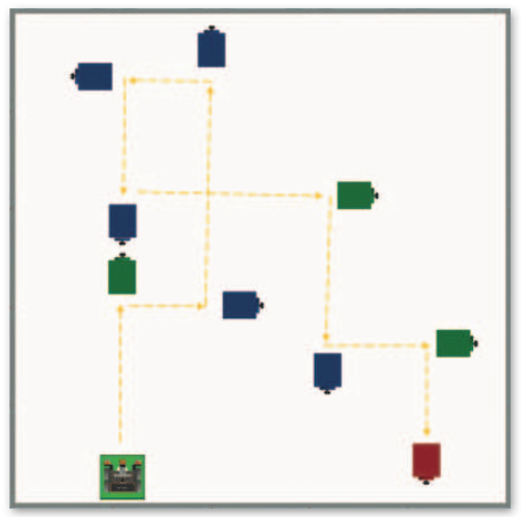
في هذا المثال، ستبرمج روبوت الواقع الافتراضي ليتنقَّل في ملعب قرص المتاهة باستخدام مستشعر العين الأمامية؛ لاكتشاف الأقراص الخضراء والزرقاء.
ستكون نقطة بداية الروبوت هي المربع الأخضر، ونقطة النهاية هي القرص المعدني الأحمر، وللوصول إلى نقطة النهاية سيتبع الروبوت الخطوات الآتية:
- التحرُّك إلى الأمام حتى يستشعر مستشعر العين الأمامية الأقراص الخضراء والزرقاء.
- التحرُّك إلى الخلف حتى تصبح المسافة من القرص أكبر من 80 مليمتر.
- الانعطاف 90 درجة إلى اليمين عند اكتشاف قرص أخضر، و90 درجة إلى اليسار عند اكتشاف قرص أزرق.
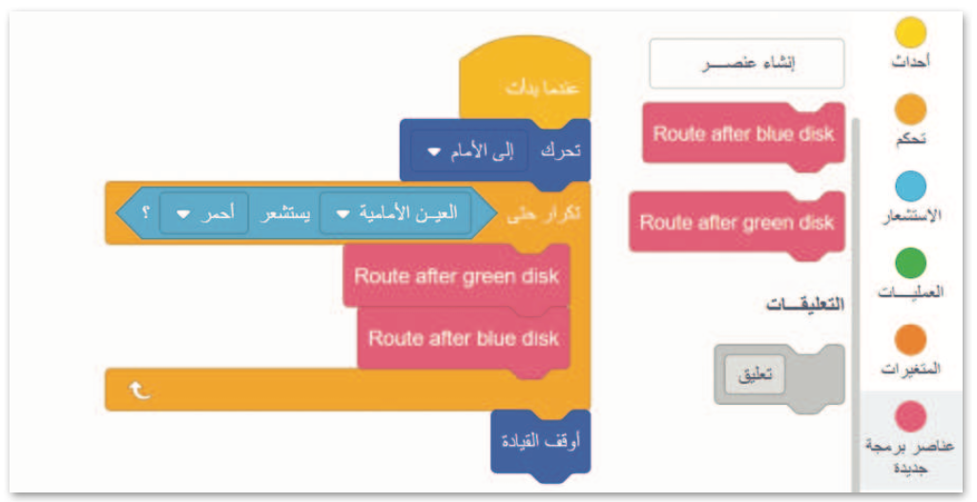
لإنشاء المقطع البرمجي الخاص بك بسهولة أكبر، ستنشئ عنصرين من عناصر البرمجة الجديدة، أحدهما يوجِّه الروبوت عند اكتشاف القرص الأخضر يسمى Route after green disk، والآخر يوجِّه الروبوت عند اكتشاف الأقراص الزرقاء ويسمى Route after blue disk.

أنشئ المقطع البرمجي الرئيس الآتي واستخدِم عنصري البرمجة الجديدين اللذين أنشأتهما من قبل لجعل الروبوت يتنقَّل في الملعب.
مثال 5: استخدام العين الأمامية للتحرك والعين السفلية لاكتشاف الأقراص الملونة
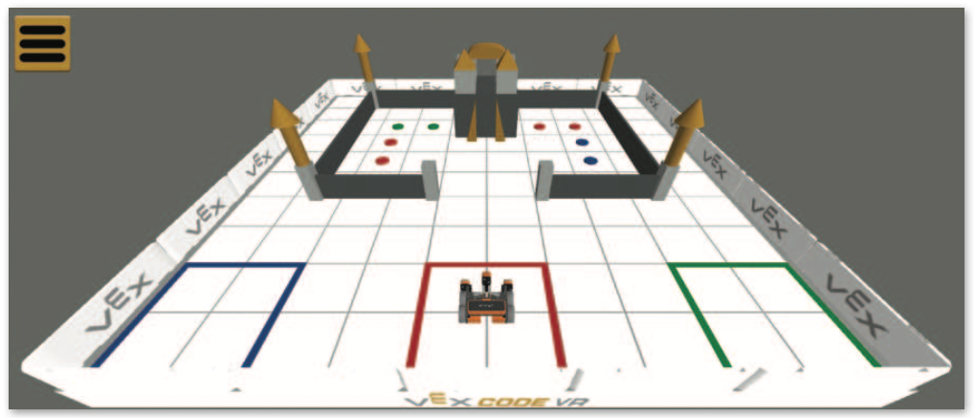
في هذا المثال، ستنشئ مقطعًا برمجيًا يتحرَّك فيه روبوت الواقع الافتراضي في ملعب نقل القرص (Disk Transport٩، ويستشعر قرصين معدنين لونهما أحمر يقعان على الجانب الأيسر من المنطقة المحاطة بالجدار، وينقلهما إلى منطقة المربع الأحمر التي تعدُّ أيضًا منطقة البداية لروبوت الواقع الافتراضي.
أولًا، أنشئ عنصر البرمجة الجديد To the walled area الذي يرشِد روبوت الواقع الافتراضي للوصول إلى المنطقة المحاطة بالجدار باستخدام مستشعر المسافة، وينعطف يسارًا بمقدار 90 درجة عندما تصبح المسافة من القلعة أقل من 400 مليمتر.

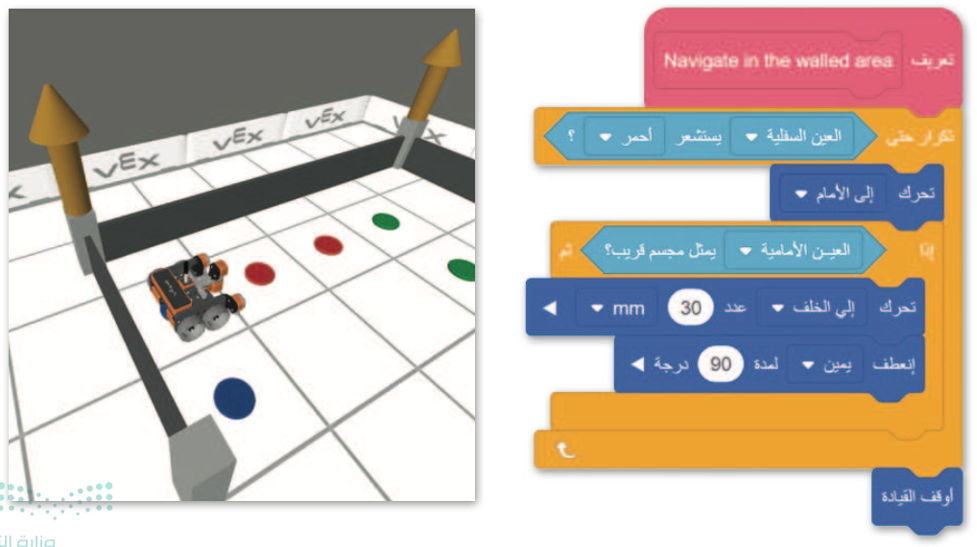
بعد ذلك أنشئ عنصر برمجة جديد يوجِّه روبوت الواقع الافتراضي للتحرُّك داخل المنطقة المحاطة بالجدار وأن ينفِّذ الآتي:
- الانعطاف يمينًا بمقدار 90 درجة على مسافة من الجدار باستخدام مستشعر العين الأمامية.
- التوقُّف عن الحركة إذا اكتشف مستشعر العين السفلية الأقراص الحمراء.
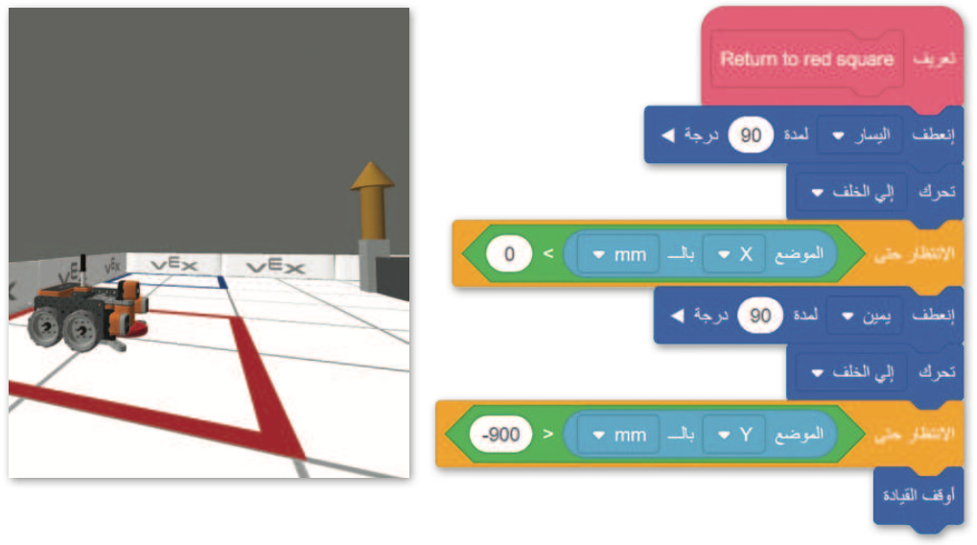
أخيرًا، برمج روبوت الواقع الافتراضي باستخدام مستشعر الموقع (Location) وموضع (X, Y)، للعودة إلى منطقة المربع الأحمر Return to red square ونقل القرص الأحمر إلى هناك.
في المقطع البرمجي الرئيس، ستستخدِم عناصر البرمجة الجديدة التي أنشأتها ولبنات عمليات المغناطيس الكهربائي لبرمجة الواقع الافتراضي لتكرار نفس الإجراء مرتين: الدخول إلى المنطقة المحاطة بالجدار، والتحرُّك فيها، واستشعار القرص المعدني الأحمر والتقاطه، ثم العودة إلى منطقة المربع الأحمر وإسقاط القرص.

بإمكانك مراجعة محتوى موضوع “مستشعرات العين” بدايةً من عنوان “ثانيًا: لبنة ( ) يستشعر” وحتى نهاية الموضوع، من خلال الرابط التالي:
اختبر تحصيلك لمحتوى الموضوع من خلال الرابط التالي:
الواجب الإلكتروني
إلى هنا يكون قد انتهى موضوع “مستشعرات العين“، لا تنسوا مراجعة نواتج التعلُّم أعلى المقال، وانتظرونا في الموضوع القادم!