مستشعرات الروبوت | الوحدة الرابعة| الدرس الأول

مستشعرات الروبوت هو عنوان الدرس الأول من الوحدة الثالثة التي تحمل اسم “المستشعرات في علم الروبوت” في الفصل الدراسي الثالث من مقرر “سادس ابتدائي”.
ستتعرف في هذا الموضوع على ماهية مستشعرات الروبوت، وكيفية برمجتها والتحكُّم بها، وطريقة اختبار الأوامر البرمجية، وتصحيحها.

لذا قم بقراءة نواتج التعلُّم بعناية، ثم أعد قراءتها وتأكَّد من تحصيل محتوياتها بعد انتهائك من دراسة الموضوع.
نواتج التعلُّم
- توضيح ماهية مستشعرات الروبوت وأهميتها.
- معرفة لبنات فئة المستشعرات.
- معرفة كيفية استخدام مستشعر الموجات فوق الصوتية لاكتشاف العوائق.
- التحكُّم في حركة الروبوت اعتمادًا على مدخلات مستشعر الألوان.
- التحكُّم في حركة الروبوت اعتمادًا على مدخلات مستشعر المسافة.
- اختبار البرنامج وتصحيح الأخطاء.
هيا لنبدأ!
مستشعرات الروبوت
كيف تشعر الروبوتات؟
بما أنّ الروبوتات ليس لها هواس مثل البشر فإنها تحمل مستشعرات (Sensors) من أجل إدراك بيئتها والتنقُّل خلالها وتنفيذ العديد من المهام.
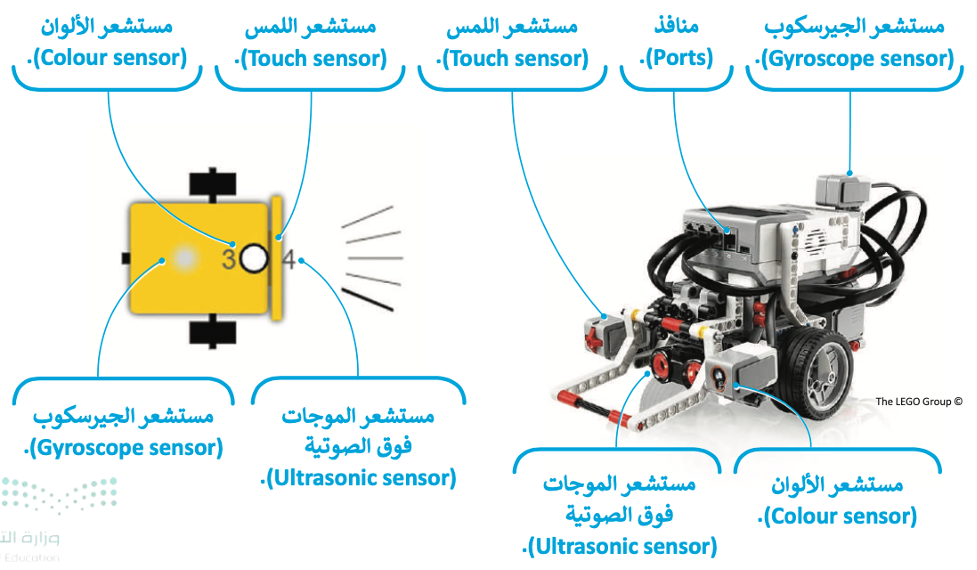
تم تجهيز الروبوت الافتراضي في بيئة محاكاة أوبن روبيرتا لاب (Open Roberta Lab) بنفس المستشعرات التي تم تجهيز روبوت EV3 المادي بها، وهي كالآتي:

تُوصِّل المستشعرات والمحركات بمعالج الروبوت المادي من خلال أسلاك التوصيل للحصول على الطاقة وتبادل المعلومات، حيث تُسمَّى نقاط الاتّصال هذه بالمنافذ (Ports).
في روبوت المحاكاة يُحدَّد المنفذ الذي يشغَله كل مستشعر بشكل افتراضي كما يُحدَّد برقم.
لمعرفة المزيد من المعلومات عن أنواع مستشعرات الروبوت، قم بالاطّلاع على الرابط التالي:
لبنات فئة المستشعرات
تحتوي فئة المستشعرات (Sensors) في بيئة المحاكاة على اللبنات البرمجية الخاصة بالمستشعرات.

مستشعر الموجات فوق الصوتية
ما هو مُستشعر الموجات فوق الصوتية؟
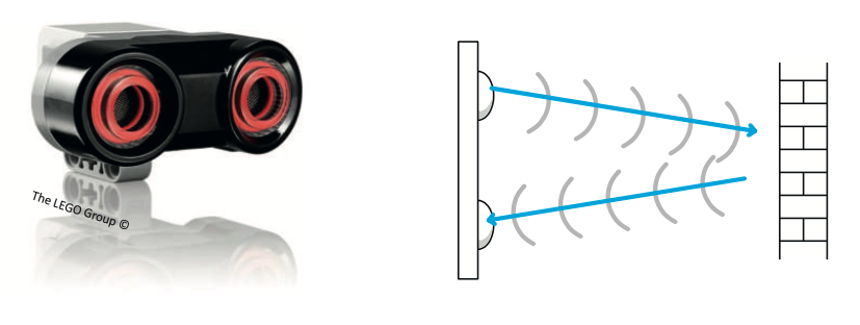
مُستشعر الموجات فوق الصوتية للروبوت EV3 هو مُستشعر رقمي يمكِنه قياس المسافة بين الروبوت وأي كائن أمامه، ويتم ذلك عن طريق إصدار موجات صوتية عالية التردُّد ثم قياس المدة الزمنية التي يستغرقها الصوت للانعكاس من الكائن الذي يوجد أمام الروبوت حتى رجوعه إلى المُستشعر.
يتم استخدام لبنة مستشعر الموجات فوق الصوتية (Ultrasonic sensor) من فئة المستشعرات (Sensors) لبرمجة قياس المسافة بين الروبوت والكائن الذي أمامه.
ستُنشئ مقاطع برمجية باستخدام مستشعر الموجات فوق الصوتية أو مستشعر الألوان.
في هذه المقاطع ستستخدِم لبنات برمجية محدَّدة لتوجيه الروبوت للحركة والتوقُّف عندما تكتشف المستشعرات مسافة أو لونًا محدَّدًا.
لاحظ أن
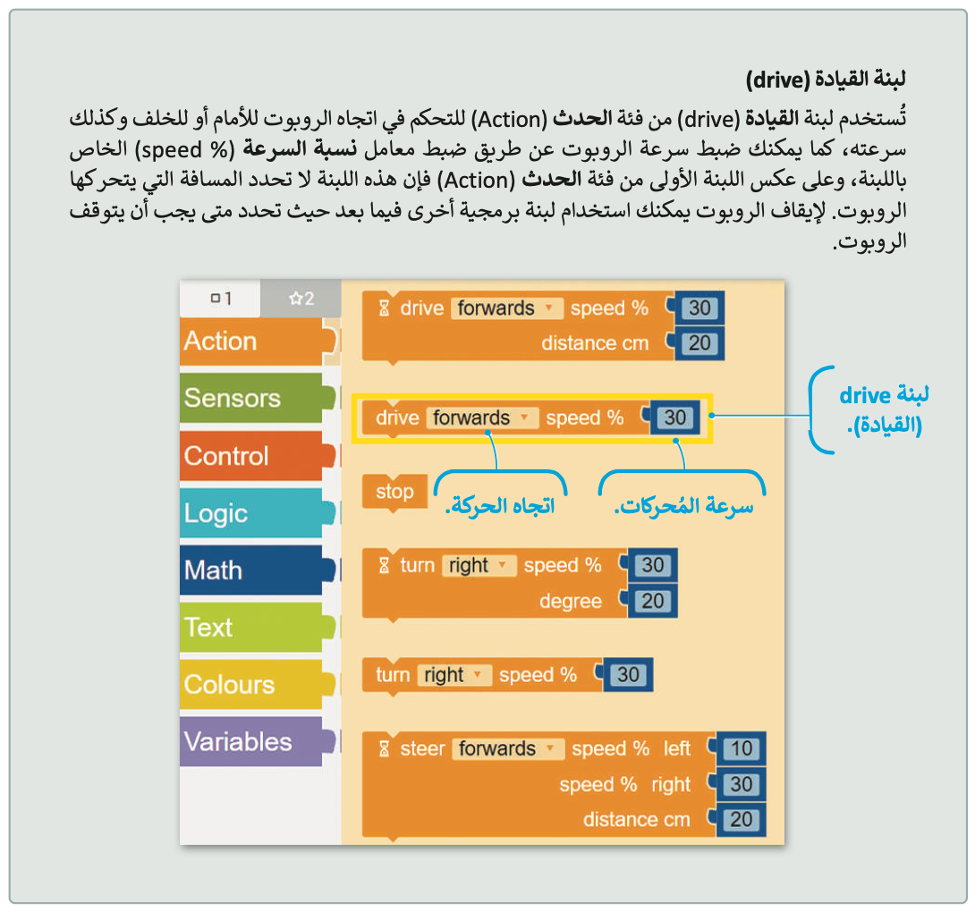
لقد استخدمت في البرامج لبنة القيادة (drive) الأولى من فئة الحدث (Action) التي تجعل الروبوت يتحرك بسرعة معيَّنة لمسافة محدَّدة.

لاحظ أن
بعد ذلك ستستخدِم لبنة الانتظار حتى (wait until) لتوجيه الروبوت لمواصلة التحرُّك إلى الأمام حتى يكتشف مستشعر المسافة مسافةً محدَّدةً من العائق.
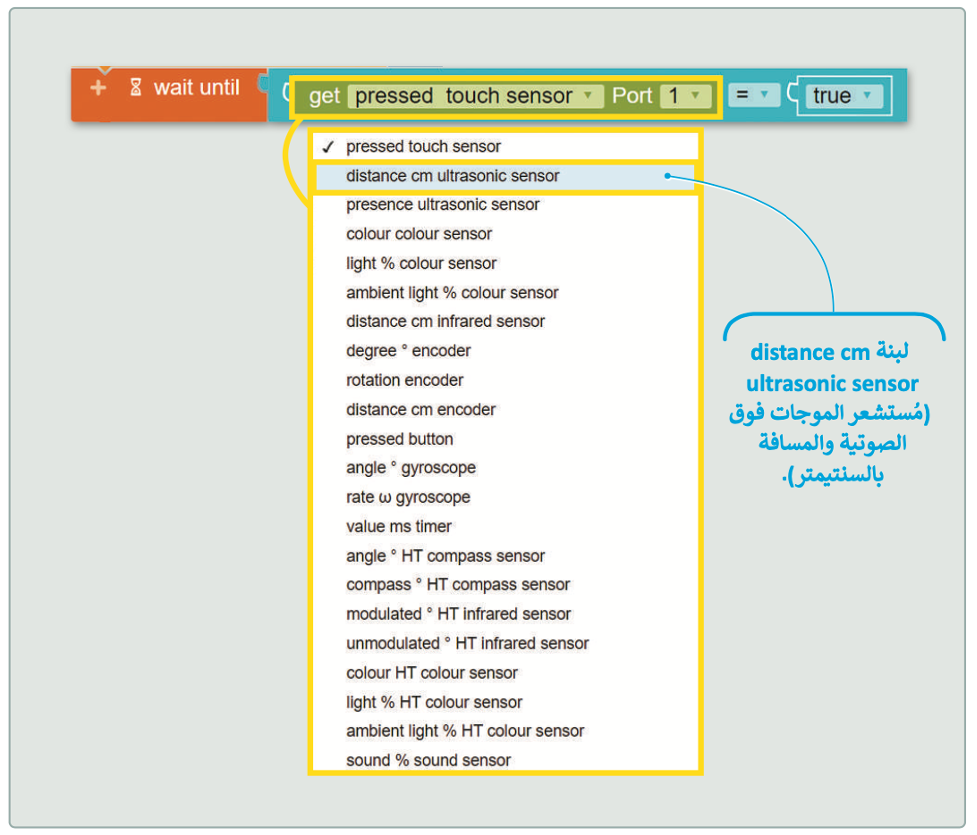
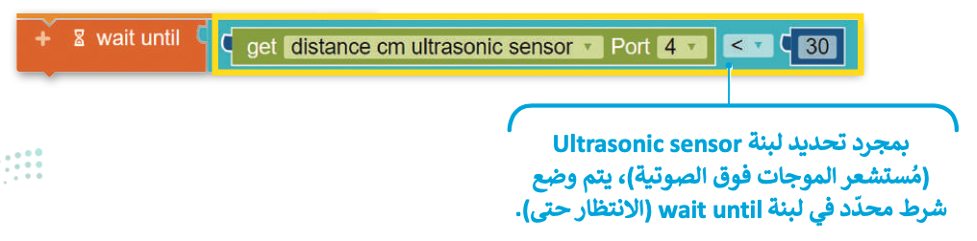
تسمح لك القائمة اليسرى للبنة الانتظار حتى (wait until) بالاختيار بين لبنات المستشعرات المتعدِّدة، بعد ذلك ستستخدِم لبنة الانتظار حتى (wait until) مع لبنة مستشعر الموجات فوق الصوتية والمسافة بالسنتيمتر (distance cm ultrasonic sensor).
تم إعداد لبنة الانتظار حتى (wait until) في المقطع البرمجي لإيقاف المقطع البرمجي مؤقتًا عندما يقيس مستشعر الموجات الصوتية مسافة أقل من 30 سنتيمتر من أقرب كائن أمامه.
مثال 1: برمجة الروبوت لاستشعار المسافات
ستُنشئ مقطعًا برمجيًا لاختبار قدرة مستشعر الموجات فوق الصوتية على اكتشاف كائن على مسافة أمامه، وبشكل أكثر تحديدًا، ستبرمج الروبوت للتحرُّك للأمام حتى اكتشاف جدار خريطة المشهد على مسافة 15 سنتيمتر منه.
يمكِنك أيضًا فتح/ إغلاق عرض بيانات المستشعر (Open\ Close the sensor’s data view)، وهي ميزة البيئة التي تتيح لك عرض عدة أنواع من بيانات الروبوت في الوقت الفعلي.
سوف تركِّز على قيم المستشعر (Sensor Values) وعلى وجه التحديد على قيمة مستشعر الموجات فوق الصوتية.
لاختبار مستشعر الموجات فوق الصوتية، أنشئ المقطع البرمجي الآتي:
لاختبار مُستشعر الموجات فوق الصوتية (ultrasonic sensor)
- من فئة لبنات Action (الحدث) أضف لبنة drive (القيادة).
- من فئة Control (التحكم)، أضف لبنة wait until (الانتظار حتى).
- حدِّد لبنة distance cm ultrasonic sensor (مُستشعر الموجات فوق الصوتية والمسافة بالسنتيمتر) من القائمة المنسدلة على يمين لبنة wait until (الانتظار حتى).
- اضغط على الرقم الافتراضي 30 واكتب 15.
- اضبط Comparison (المقارنة) لتكون < من القائمة المنسدلة على يمين لبنة wait until (الانتظار حتى).
- اضغط لفتح simulation view (عرض المحاكاة).
- حدِّد خريطة المشهد.
- اضغط لفتح sensor’s data view (عرض بيانات المستشعر).
- شغِّل المقطع البرمجي.

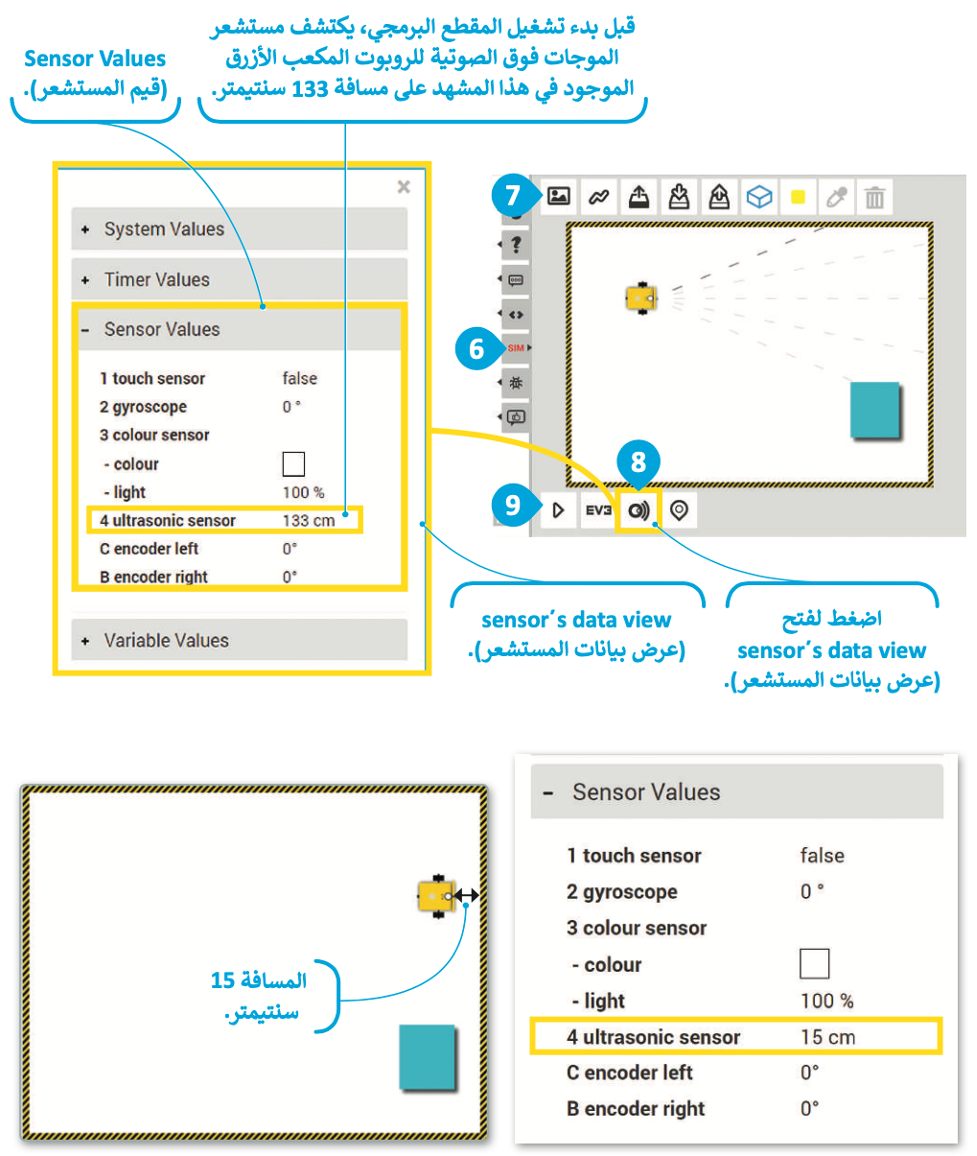
يمكِنك أيضًا وضع عائق الخريطة على مسافة أمام الروبوت وتشغيل نفس المقطع البرمجي مرة أخرى.
مُستشعر الألوان
مستشعر الألوان (Colour Sensor) في روبوت EV3 هو مستشعر رقمي يمكِنه اكتشاف لون سطح معيَّن، أو شدة الضوء المُنعكس على هذا السطح عند سقوط شعاع الضوء الأحمر للمُستشعر عليه.
يُمكِن أيضًا لمستشعر الألوان في روبوت EV3 قياس شدة الإضاءة في بيئته المحيطة، مثل ضوء الشمس القادم من النافذة أو ضوء المصباح.
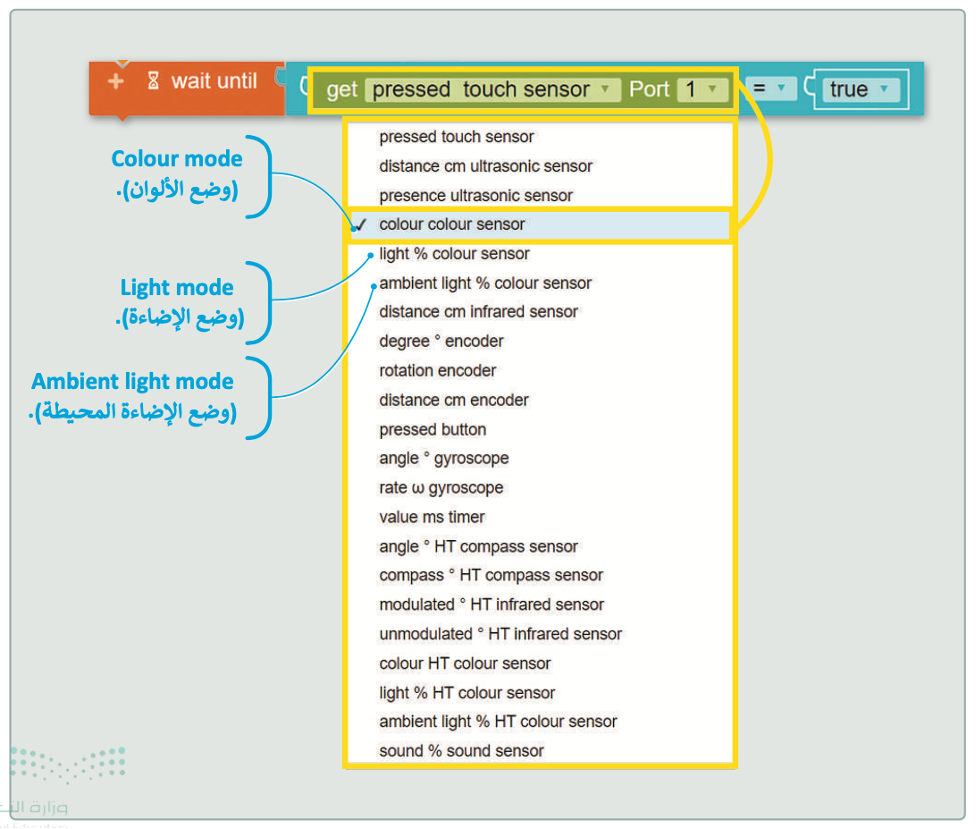
يمكِن كذلك استخدام الأوضاع المختلفة لمستشعر الألوان في روبوت EV3 في بيئة المحاكاة من قائمة لبنة الانتظار حتى (wait until).

ستُنشئ مقطعًا برمجيًا باستخدام مستشعر الألوان في وضع الألوان (Colour mode).
مثال 2: برمجة الروبوت لاستشعار الألوان
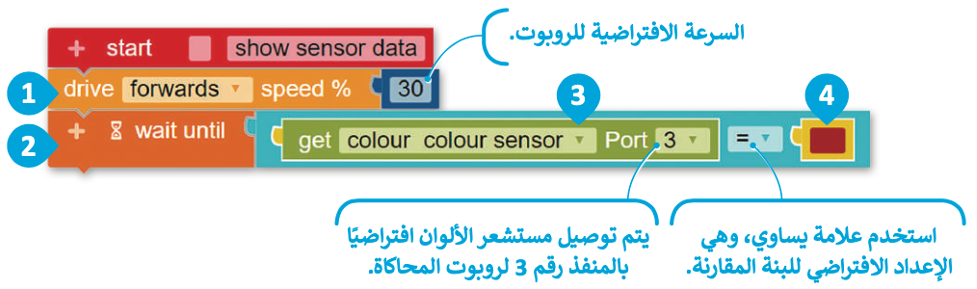
سوف تُنشئ مقطعًا برمجيًا ليتحرك الروبوت حتى يكتشف مستشعر الألوان اللون الأحمر. في هذا المثال ستختبر مستشعر الألوان في وضع الألوان.
لاختبار مُستشعر الألوان:
- من فئة لبنات Action (الحدث) أضف لبنة drive (القيادة).
- من فئة Control (التحكم)، أضف لبنة wait until (الانتظار حتى).
- حدِّد لبنة colour colour sensor (لون مستشعر الألوان) من القائمة المنسدلة على يمين لبنة wait until (الانتظار حتى).
- تأكَّد من اختيار اللون الأحمر.
لاحظ أن
يمكِن للسيارة ذاتية القيادة اكتشاف الألوان المختلفة لإشارات المرور، ويمكِن للروبوت فرز العناصر المختلفة حسب لونها.
شغِّل المقطع البرمجي في خريطة المشهد الآتية. عليك سحب ومحاذاة الروبوت في اتّجاه المناطق الملوَّنة.
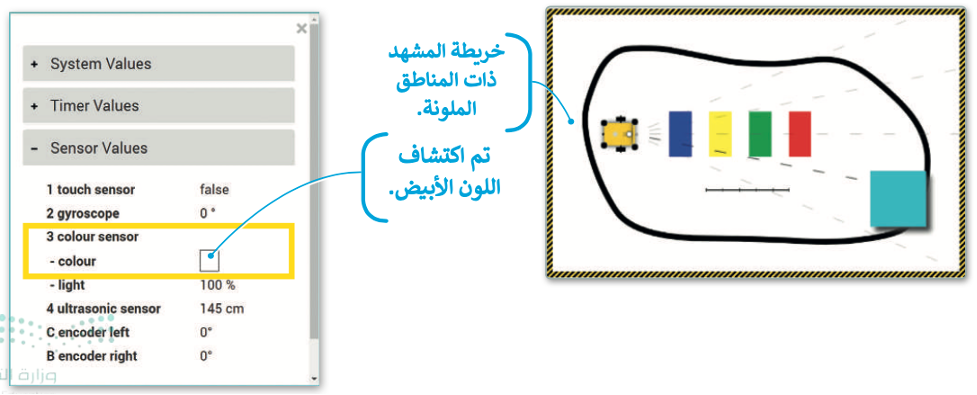
استخدم عرض بيانات المستشعر لملاحظة الألوان التي يكتشفها مستشعر الألوان في الروبوت أثناء تحركه. قبل أن يصل الروبوت إلى المناطق الملوَّنة، يكون فوق المنطقة البيضاء من المشهد حيث يكتشف المستشعر اللون الأبيض.
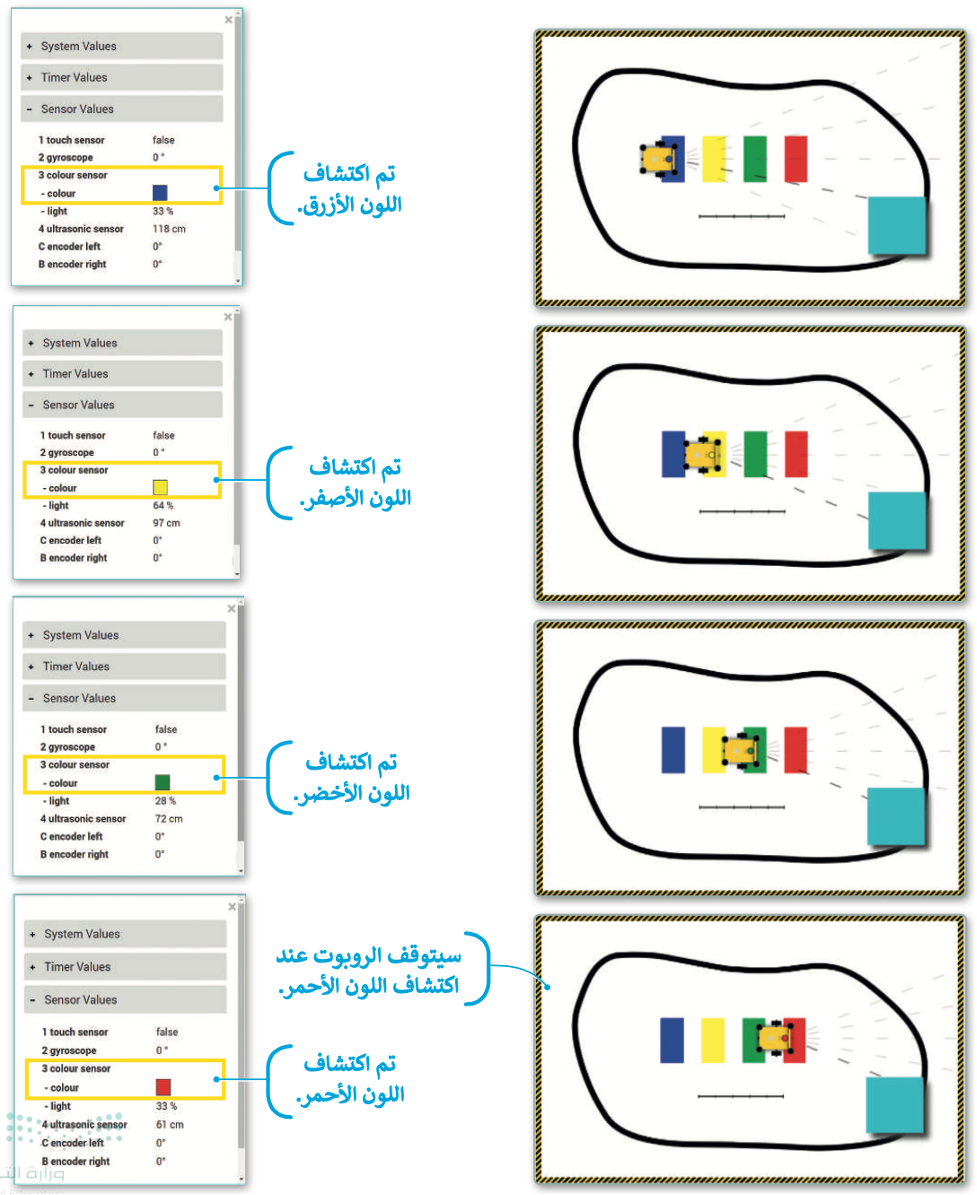
عند تشغيل المقطع البرمجي وحركة الروبوت للأمام، سيعبر الروبوت المناطق الملوَّنة الآتية (الأزرق والأصفر والأخضر والأحمر) من المشهد، ويكتشف مستشعر الألوان (Colour Sensor) ألوانها. وعند اكتشاف اللون الأحمر، سيتوقف الروبوت مباشرةً عن الحركة.
اختبار المقطع البرمجي وتشخيص الأخطاء
يجب اختبار البرنامج الموجَّه للروبوت للتأكُّد من سلامته ودقته وخلوه من الأخطاء، كما يجب تحديد موقع أي خطأ في المقطع البرمجي وتصحيحه، وتسمى هذه العملية بإجراء تصحيح الأخطاء (Debugging procedure).

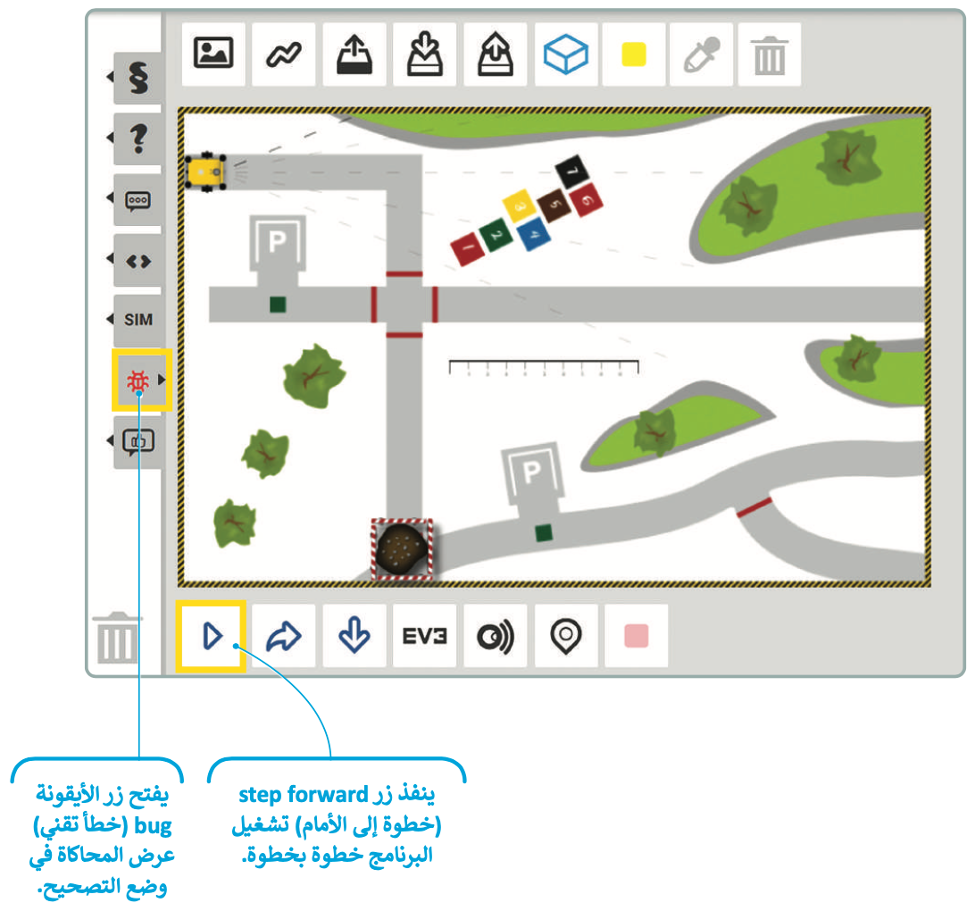
يمكِنك تشغيل مقطع برمجي في وضع التصحيح (debug mode) في أوبن روبيرتا لاب.
بإمكانك مراجعة محتوى موضوع “مستشعرات الروبوت” بالكامل، من خلال الرابط التالي:
اختبر تحصيلك لمحتوى الموضوع من خلال الرابط التالي:
الواجب الإلكتروني
إلى هنا يكون قد انتهى موضوع “مستشعرات الروبوت“، لا تنسوا مراجعة نواتج التعلُّم أعلى المقال، وانتظرونا في الموضوع القادم!