انعطاف الروبوت | الوحدة الرابعة | الدرس الثاني
انعطاف الروبوت هو عنوان الدرس الثاني من الوحدة الثالثة التي تحمل اسم “مقدمة في علم الروبوت” في الفصل الدراسي الثالث من مقرر “رابع ابتدائي”.
ستتعرف في هذا الموضوع على طريقة برمجة الروبوت بمجموعة أكبر من الحركات.

لذا قم بقراءة نواتج التعلُّم جيدًا، ثم أعد قراءتها وتأكَّد من تحصيل كافة محتوياتها بعد انتهائك من دراسة الموضوع.
نواتج التعلُّم
- برمجة الروبوت للانعطاف وإنشاء أشكال.
هيا لنبدأ!
مقدمة – انعطاف الروبوت
بعد أن تعلَّمت كيفية استخدام لبنة مسافة القيادة بالسنتيمتر (drive distance cm) للتحرُّك للأمام وللخلف، ستستخدِمها مع لبنة مسافة التوجيه بالسنتيمتر (steer distance cm) لتنفيذ الانعطافات وعمل أشكال وخطوط بالروبوت.

لمعرفة المزيد من المعلومات عن روبوت فيكس كود في آر، قم بالاطّلاع على الرابط التالي:
إنشاء مشروع جديد
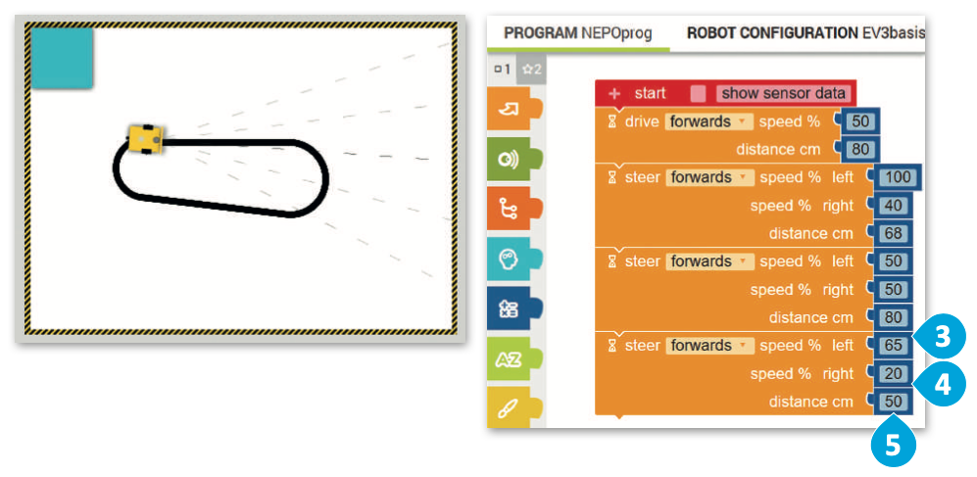
ستحتاج في البداية إلى إنشاء مشروع جديد، لكتابة مقطع برمجي يتمكَّن فيه الروبوت من رسم الشكل الموجود في الصورة.
لإنشاء مشروع جديد:
- من قائمة edit (تحرير).
- اختر new (جديد).

القيام بالحركات الأساسية
تعلَّمت في الموضوع السابق كيفية استخدام لبنة مسافة القيادة بالسنتيمتر لتحريك الروبوت إلى الأمام أو الخلف.
لذا فإن اللبنة الأولى التي ستَستخدِمها في هذا المقطع البرمجي ستكون أيضًا لبنة مسافة القيادة بالسنتيمتر.

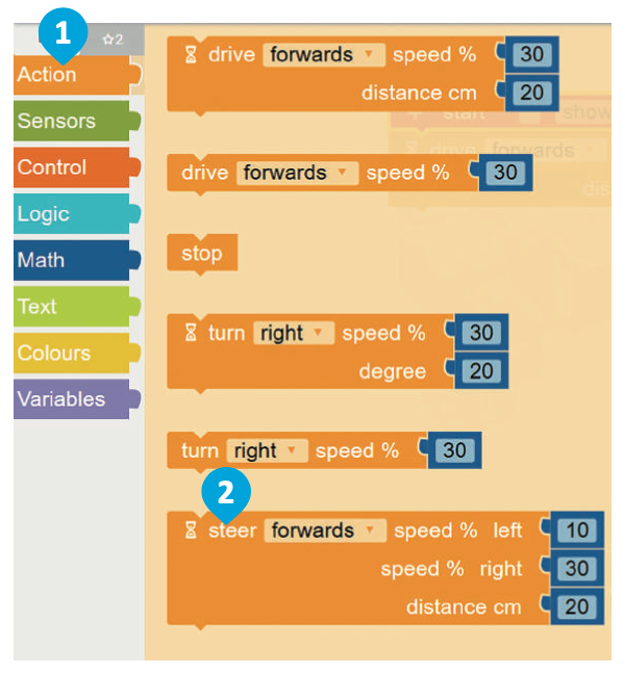
- من فئة Action (الحدث)، أضف لبنة drive distance cm (مسافة القيادة بالسنتيمتر).
- اضبط speed (السرعة) إلى 50.
- اضبط distance cm (المسافة بالسنتيمتر) إلى 80.

التحكم باتجاه الروبوت
ستَستخدِم لبنتين لجعل الروبوت يتحرَّك للأمام ثم ينعطف لليمين، وستضيف لبنة أخرى إلى التسلسل البرمجي وهي لبنة مسافة التوجيه بالسنتيمتر (steer distance cm).
تتشابه هذه اللبنة مع لبنة مسافة القيادة بالسنتيمتر (drive distance cm) ولكنها تختلف في إمكانية التحكُّم في حركة محركي الروبوت الرئيسين بشكل مستقل.
لكي ينعطف الروبوت إلى اليمين، يحتاج المحرك الأيسر إلى العمل بشكل أسرع من المحرك الأيمن، وذلك بضبط سرعته إلى 100، بينما تكون سرعة المحرك الأيمن إلى 40 وبمسافة 68 سنتيمتر.
الانعطاف إلى اليمين:
- من فئة Action (الحدث).
- أضف لبنة steer (التوجيه) مع معامل distance cm (المسافة بالسنتيمتر).
- اضبط سرعة speed left (المحرك الأيسر) إلى 100.
- اضبط سرعة speed right (المحرك الأيمن) إلى 40.
- اضبط distance cm (المسافة بالسنتيمتر) إلى 68.


لاحظ أن
في كل مرة تضيف لبنة جديدة إلى المقطع البرمجي، يمكِنك تشغيل المقطع البرمجي لاختبار كيفية تأثير كل لبنة جديدة على حركة الروبوت. تذكَّر أنك بحاجة إلى استعادة الموضع الافتراضي للروبوت ومسح المشهد بالضغط على زر إعادة الضبط.
وحتى يكمل الروبوت الحركة بالشكل المطلوب؛ لابد أن يتحرك للأمام مع سرعة 50 لكلا المحركين ولمسافة 80 سم.
التحرك للأمام:
- من فئة Action (الحدث).
- أضف لبنة steer (التوجيه) مع معامل distance cm (المسافة بالسنتيمتر).
- اضبط سرعة speed left (المحرك الأيسر) إلى 50.
- اضبط سرعة speed right (المحرك الأيمن) إلى 50.
- اضبط distance cm (المسافة بالسنتيمتر) إلى 80.


معلومة
نظرًا لعمل المحرك الأيمن والمحرك الأيسر بصورة مستقلة، يمكِنك برمجتهما للتحرُّك بسرعات مختلفة لكي ينعطف الروبوت.
في الختام، وحتى يكمل الروبوت عمل الشكل المطلوب. لابد أن ينعطف الروبوت إلى اليمين مرةً أخرى مع ضبط سرعة المحرك الأيسر إلى 65، وسرعة المحرك الأيمن إلى 20، والمسافة إلى 50 سم.
الاستدارة إلى اليمين:
- من فئة Action (الحدث).
- أضف لبنة steer (التوجيه) مع معامل distance cm (المسافة بالسنتيمتر).
- اضبط سرعة speed left (المحرك الأيسر) إلى 65.
- اضبط سرعة speed right (المحرك الأيمن) إلى 20.
- اضبط distance cm (المسافة بالسنتيمتر) إلى 50.
بإمكانك مراجعة محتوى موضوع “انعطاف الروبوت” بالكامل، من خلال الرابط التالي:
اختبر تحصيلك لمحتوى الموضوع من خلال الرابط التالي:
الواجب الإلكتروني
إلى هنا يكون قد انتهى موضوع “انعطاف الروبوت“، لا تنسوا مراجعة نواتج التعلُّم أعلى المقال، وانتظرونا في الموضوع القادم!