الحركة التلقائية | الوحدة الرابعة| الدرس الثالث

الحركة التلقائية هو عنوان الدرس الثالث من الوحدة الثالثة التي تحمل اسم “برمجة الروبوت الافتراضي” في الفصل الدراسي الثالث من مقرر “أول متوسط”.
ستتعرف في هذا الموضوع على مستشعر الجيرسكوب (Gyro sensor) وكيفية تحريك الروبوت عن طريق استخدامه. بالإضافة إلى ذلك ستتعلَّم وظائف لبنات استشعار الموضع (Location Sensing) وكيفية استخدام المعاملات المنطقية (Logical Operators)، كما ستتعلَّم كيفية التحكُّم في تدفق المقطع البرمجي عن طريق عملية التأخير بين الخطوات أو الانتظار حتى انتهاء حدث ما. وفي النهاية ستتعلَّم كيفية اتخاذ القرارات في البرمجة.
لذا قم بقراءة نواتج التعلُّم بعناية، ثم أعد قراءتها بعد انتهائك من دراسة الموضوع وتأكَّد من تحصيل محتوياتها.
نواتج التعلُّم
- ماهية مستشعر الجيرسكوب واستخدامه مع اللبنات البرمجية المختلفة.
- طريقة عمل المعاملات الشرطية في البرمجة.
- اتّخاذ القرارات في البرمجة.
هيا لنبدأ!
مقدمة – الحركة التلقائية
يوجد في فيكس كود في آر (VEXcode VR) عدة مستشعرات يمكِن استخدامها للتحكُّم في حركة الروبوت المختلفة.
بشكل عام، يتم استخدام المستشعرات لاكتشاف التغيّرات في البيئة المحيطة، فعند ذهابك لمركز تجاري مثلًا، تفتح بعض الأبواب بصورة تلقائية لاحتوائها على مستشعر للأشعة تحت الحمراء يمكِنه اكتشاف التغيّر في درجة الحرارة.

ستتعرَّف في هذا الموضوع على كيفية استخدام مستشعر الجيرسكوب لتحريك روبوتك في ساحة اللعب.
مستشعر الجيرسكوب
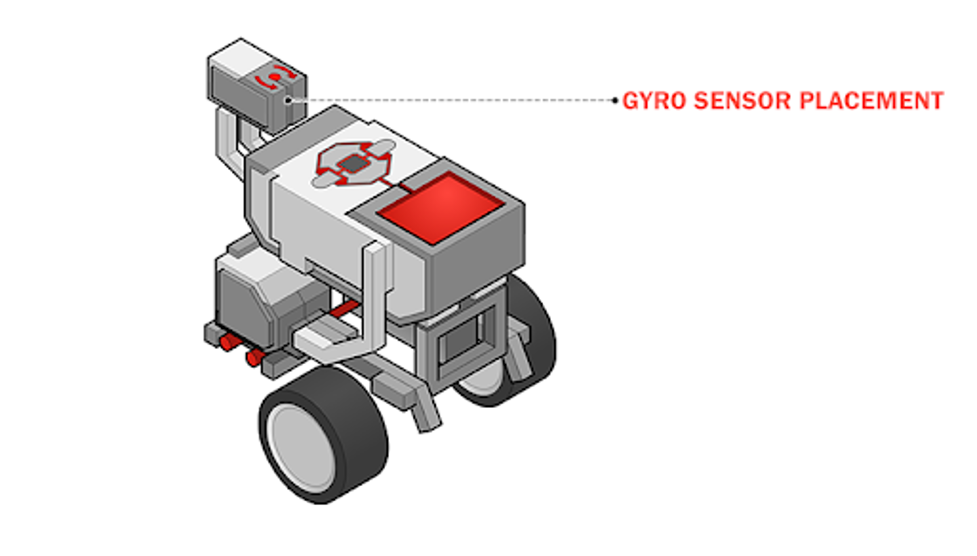
يوجد مستشعر الجيرسكوب (Gyro sensor) في الجزء الخلفي من الروبوت. يتم تحديد موضع الروبوت الافتراضي وفق مركزه للانعطاف وهو موقع قلم الروبوت أيضًا.
يتم استخدام مستشعر الجيرسكوب للملاحة، لأنه يُمكِّن من تحديد اتّجاه الروبوت ويقيس سرعة واتّجاه انعطاف الروبوت.
يُمكِّن مستشعر الجيرسكوب الروبوت من القيادة بشكل مستقيم والانعطاف بصورة صحيحة.
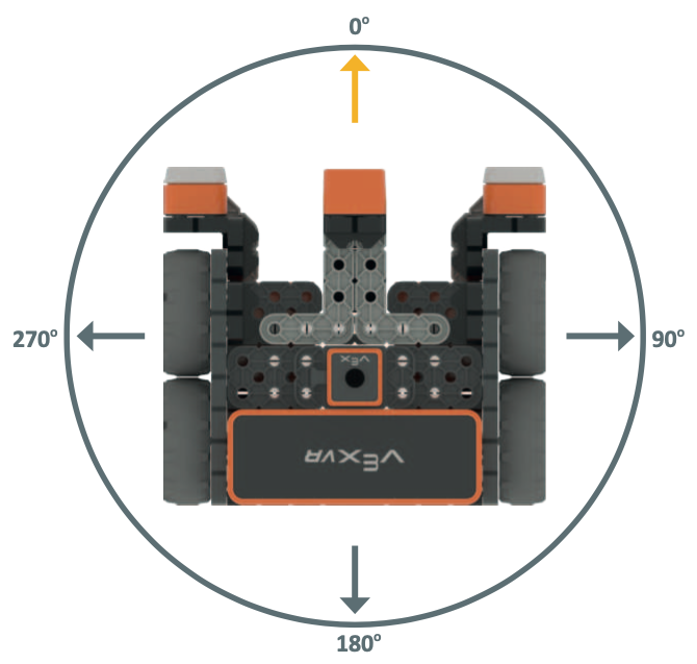
لاحظ أن مستشعر الجيرسكوب يمكِنه اكتشاف ما إذا كانت الحركة باتّجاه عقارب الساعة أو عكس اتّجاه عقارب الساعة، بالإضافة إلى تحديد تغيّر موقع الروبوت أثناء حركته في ساحة اللعب.
لاحظ أن
يمكِن لمستشعر الجيرسكوب تحديد الاتّجاه ومسافة انعطاف الروبوت عن نقطة البداية.
لمعرفة المزيد من المعلومات عن مستشعر الجيرسكوب، قم بالاطّلاع على الرابط التالي:
موقع الاستشعار
يتم استخدام لبنات الموضع ( ) بالـ ( ) (position ( ) in ( )) وزاوية الموضع بالدرجات (position angle in degrees) مع مستشعر الجيرسكوب.
توجد هذه اللبنات باللون الأزرق الفاتح في فئة الاستشعار (Sensing category) في قسم موقع الاستشعار (Location Sensing).

للتذكير فإن لبنة الموضع ( ) بالـ ( ) يتم استخدامها لتحديد موقع حركة الروبوت الافتراضي في ساحة اللعب، بينما يتم استخدام لبنة زاوية الموضع بالدرجات لتحديد الانعطافات التي يقوم بها.
الجمل الشرطية
يعدُّ اتّخاذ القرارات جزءًا مهمًا من الحياة اليومية. فأنت تتخذ القرارات بناءً على ما تلاحظه أو بما تعتقد بأنه صواب.
عندما تمطر السماء فسنستخدِم المظلة، فالشروط هي السبب ولها نتيجة معيَّنة. في الواقع لا يمكِن للحاسوب أن يقرر بنفسه كيفية الاستجابة لأحداثٍ أو ظروفٍ معيَّنة، ولذلك يتم استخدام الجمل الشرطية التي تُخبر الحاسب بما يجب أن يقوم به ومتى يفعل ذلك.
المعاملات الشرطية في فيكس كود في آر
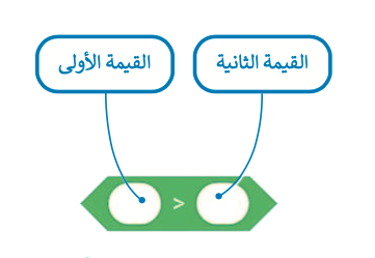
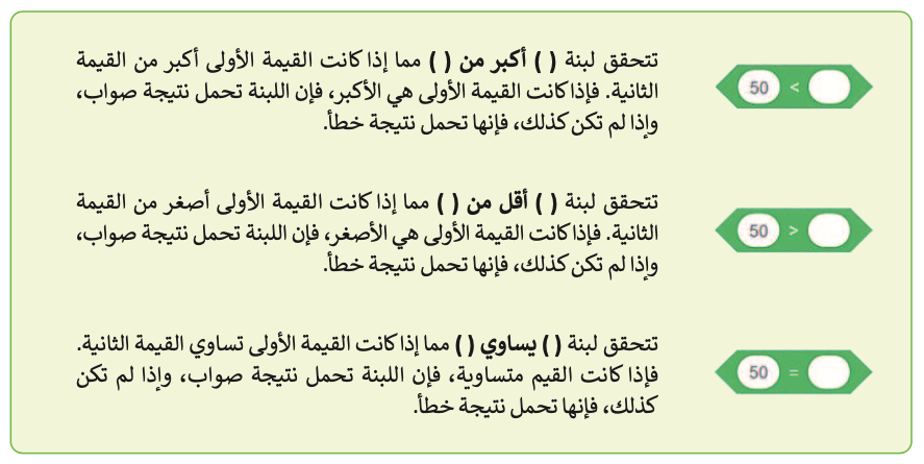
عند كتابة الجمل الشرطية، يمكِنك استخدام المعاملات للمقارنة بين القيم وتصرفها بناءً على النتيجة. إن نتيجة الفحص الشرطي هي إما صواب (True) أو خطأ (False). توجد 3 لبنات للمعاملات الشرطية:
- لبنة أكبر من ( ) < ( ) (( ) greater than ( ))
- لبنة أصغر من ( ) > ( ) (( ) less than ( ))
- لبنة يساوى ( ) = ( ) (( ) equal to ( ))
تحتوي كل لبنة على صندوقين فارغين تكتب فيهما نصًا أو تضع قيمة معيَّنة (مثل لبنة الإجابة). يمكِن العثور على جميع هذه اللبنات في فئة لبنات العمليات باللون الأخضر.
لتلقِ نظرةً على اللبنات الشرطية الثلاث التي ستقوم بربطها مع لبنات موقع الاستشعار في هذا الموضوع.
بإمكانك مراجعة محتوى موضوع “الحركة التلقائية” من بدايته وحتى هذه النقطة، من خلال الرابط التالي:
استخدام لبنات العمليات الشرطية
لكي تستخدِم لبنات العمليات الشرطية فإنك تحتاج إلى ربطها مع اللبنات ذات الشكل السداسي. ستتعرَّف الآن على لبنتين جديدتين من فئة لبنات التحكُّم باللون البرتقالي.
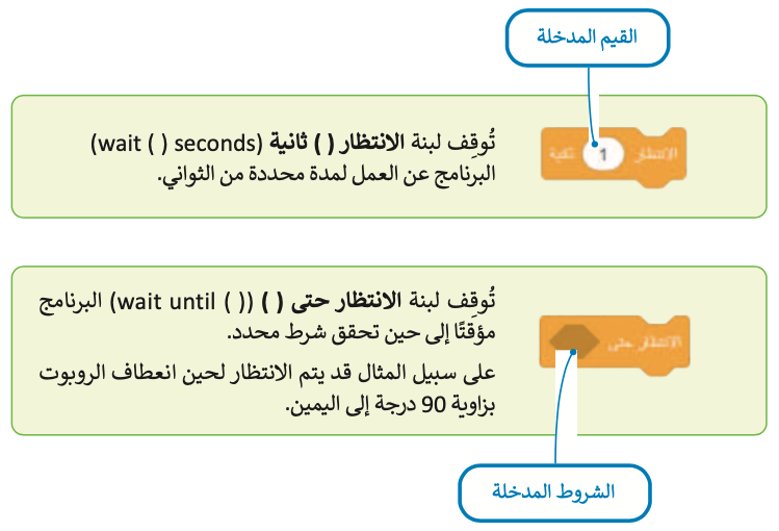
لاحظ وجه الاختلاف بين لبنة الانتظار ( ) ثانية ولبنة الانتظار حتى ( ). فصندوق الإدخال الخاص بلبنة الانتظار ( ) ثانية بيضاوي الشكل لأن القيم المدخلة تقتصر فقط على القيم، بينما يتخذ الصندوق الخاص بلبنة الانتظار حتى ( ) شكلًا مضلعًا لأن القيم المدخلة قد تكون شروطًا فقط.
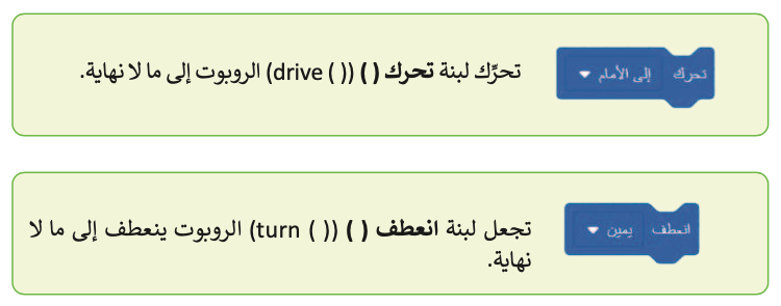
قبل إنشاء مقطع برمجي جديد باستخدام اللبنات التي تعلَّمتها، ألقِ نظرة على لبنتين إضافيتين من فئة لبنات نظام الدفع (Drivetrain) باللون الأزرق، والتي ستستخدِمها مع لبنة الانتظار حتى ( ) لإنشاء المقاطع البرمجية التالية:
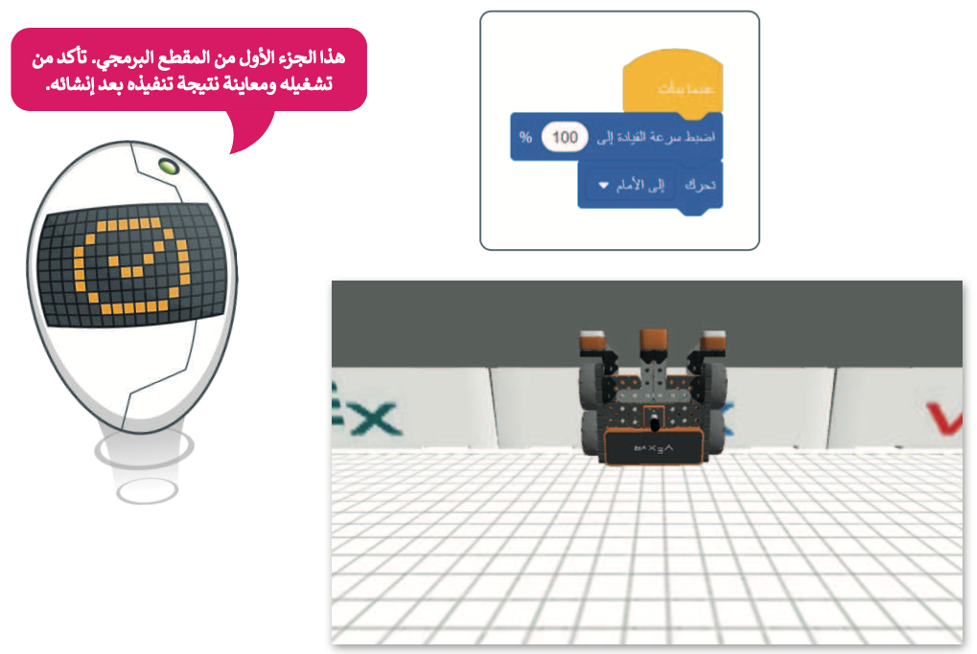
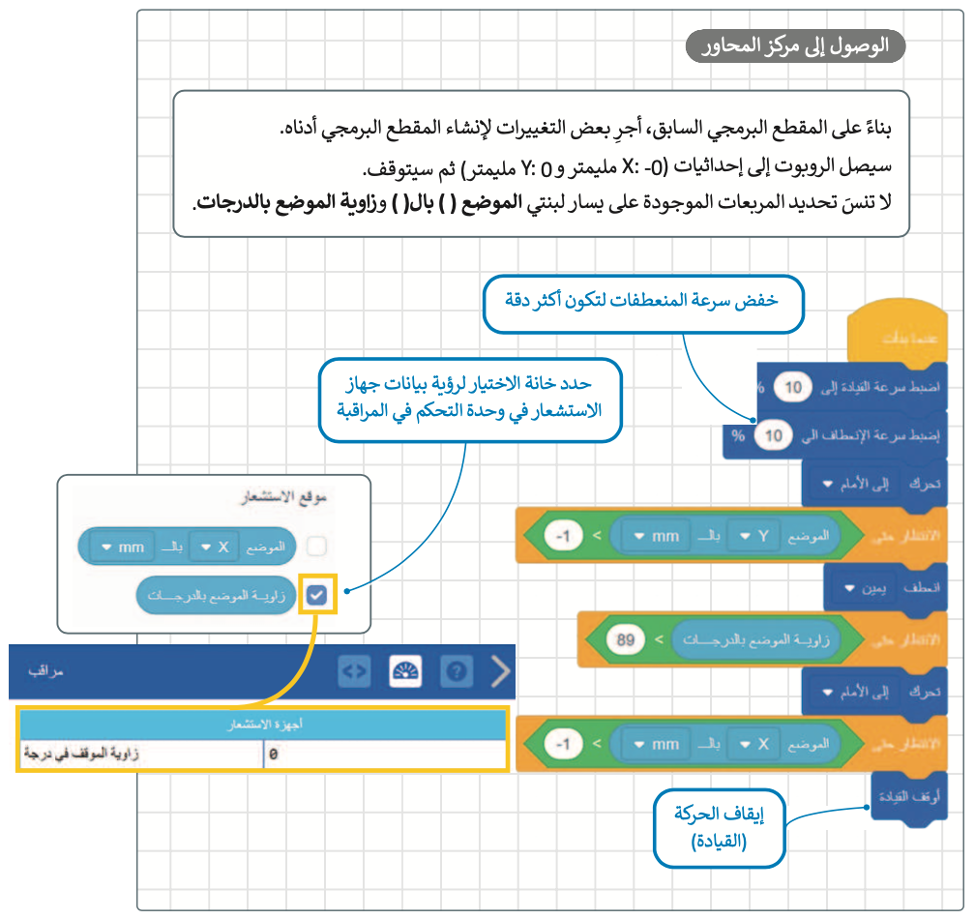
استخدِم مجموعة اللبنات المختلفة التي تعلَّمتها سابقًا في الموضوع لإنشاء برنامج على ساحة لعب شبكة خريطة (Grid Map) لجعل الروبوت يتقدَّم للأمام وصولًا للنقطة بإحداثيات (X: -900 مليمتر وY: 0 مليمتر) ثم التوقُّف.
لاحظ أن
يكتشف مستشعر الجيرسكوب الحركة بدقة أكبر عندما تكون السرعة منخفضة.
لكي يصل الروبوت إلى النقطة بإحداثيات (X: -900 مليمتر وY: 0 مليمتر)، يتعيَّن عليك الآتي:
الانتقال إلى النقطة (X: -900 مليمتر وY:0 مليمتر):
- من فئة التحكم (Control)، أضف لبنة الانتظار حتى ( ) (wait until ( )).
- من فئة العمليات (Operators)، أضف لبنة ( ) أكبر من ( ) (( ) greater than ( ))
- غيِّر القيمة الثانية إلى -1.
- من فئة الاستشعار (Sensing)، أضف لبنة الموضع ( ) بالـ ( ) (position ( ) in( )) إلى الجزء الأول من لبنة ( ) أكبر من ( ) (( ) greater than ( )).
- اضغط على القائمة المنسدلة واختر Y.
- من فئة نظام الدفع (Drivetrain)، أضف لبنة أوقف القيادة (stop driving).

قبل تشغيل المقطع البرمجي، انتقل إلى مجموعات فئة الاستشعار ذات اللون الأزرق الفاتح في قسم موقع الاستشعار حدِّد المربع الموجود على يسار لبنة الموضع ( ) بالـ ( ) السابقة.
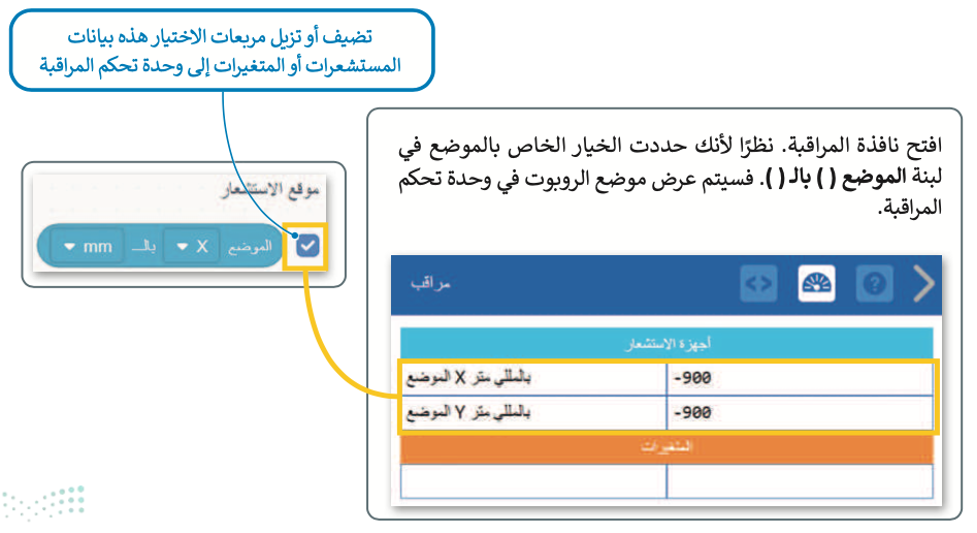
قد تلاحظ في المقطع البرمجي السابق الذي أنشأته أن إحداثيات الموقع المعروض لن تكون بالتحديد (X: -900 مليمتر وY: 0 مليمتر)، يرجع هذا إلى أن تسلسل تنفيذ المقطع البرمجي يستغرق بعض الوقت أثناء معالجته لكل لبنة برمجية.
شغِّل مقطعك البرمجي مرةً أخرى بعد تغيير التسارع إلى %10. هل حصلت على نتيجة أفضل؟
نصيحة ذكية
لا تنسَ أن نافذة التحكُّم تعرِض جميع قيم المستشعر الخاصة بالروبوت الافتراضي، وهذا يفيد عند الحاجة للرجوع إليه أثناء المشروع أو عند الانتهاء منه.
كيف تعمل لبنة إذا () ثم؟
تسمح الجمل الشرطية بالتحكُّم فيما يفعله برنامج الحاسب، وتجعل الحاسب يقوم بإجراءات مختلفة بناءً على العبارات المنطقية.
ينفِّذ البرنامج قسمًا معيَّنًا من التعليمات البرمجية بناءً على ما إذا كان الشرط صواب أو خطأ.
من أكثر الطرق شيوعًا لاتّخاذ القرارات البرمجية لبنة إذا ( ) ثم، والتي تتحكَّم في تسلسل عمليات البرنامج.
تنتمي لبنة إذا ( ) ثم، في “فيكس كود في آر” إلى فئة لبنات التحكُّم باللون البرتقالي وتتحكَّم في سير البرنامج.

بإمكانك مراجعة محتوى موضوع “الحركة التلقائية” بدايةً من عنوان “استخدام لبنات العمليات الشرطية” وحتى هذه النقطة، من خلال الرابط التالي:
كيفية إعادة ضبط الاتجاه والانعطاف
يعتبر تحديد موقع واتّجاه الروبوت أثناء تحركه في ساحة اللعب أمرًا مهمًا للغاية، وتساعِد هذه المعلومات على نقل الروبوت إلى موقع آخر إذا أردت ذلك.
فعلى سبيل المثال إذا أردت الذهاب إلى مدرستك، فإنك ستتوجه إلى مدخل المنزل، وستمضي قدمًا وتفتح الباب وتمضي لتصل إلى رصيف الشارع، ثم ستتابع التقدُّم وتنعطف باتّجاه مدرستك وستستمر بهذا الأمر حتى الوصول إلى المدرسة.
يمكِن القيام بهذا الأمر باستخدام الروبوت من خلال استخدام فئة لبنات نظام الدفع وبالاستعانة بفئة لبنات الاستشعار.
يمكِن العثور على هذه اللبنات في فئة لبنات نظام الدفع.

يمكِن العثور على هذه اللبنات في فئة لبنات الاستشعار باللون الأزرق الفاتح في قسم مستشعرات نظام الدفع.

معلومة
يمكِنك دائمًا تتبع اتّجاه الروبوت الافتراضي وعدد الانعطافات التي قام بها.

بإمكانك مراجعة محتوى موضوع “الحركة التلقائية” بدايةً من عنوان “كيفية إعادة ضبط الاتجاه والانعطاف” وحتى نهاية الموضوع، من خلال الرابط التالي:
اختبر تحصيلك لمحتوى الموضوع من خلال الرابط التالي:
الواجب الإلكتروني
إلى هنا يكون قد انتهى موضوع “الحركة التلقائية“، لا تنسوا مراجعة نواتج التعلُّم أعلى المقال، وانتظرونا في الموضوع القادم!